

 QQ
QQ
台达 ASDA 伺服定位演示系统
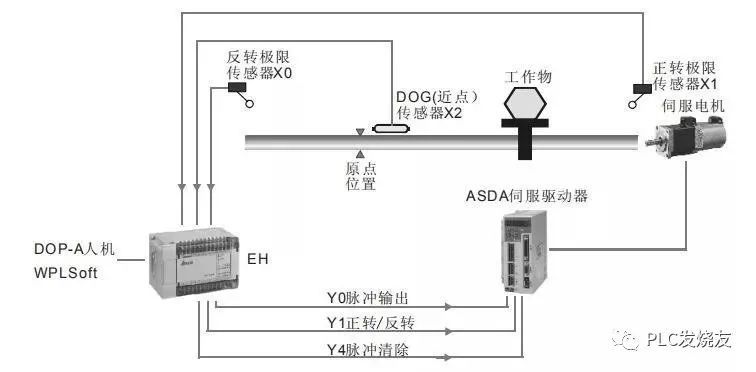
控制要求
1、由台达 PLC 和台达伺服组成一个简单的定位控制演示系统。通过 PLC 发送脉冲控制伺服,实现原点回归、相对定位和***定位功能的演示。
2、z 监控画面:原点回归、相对定位、***定位。
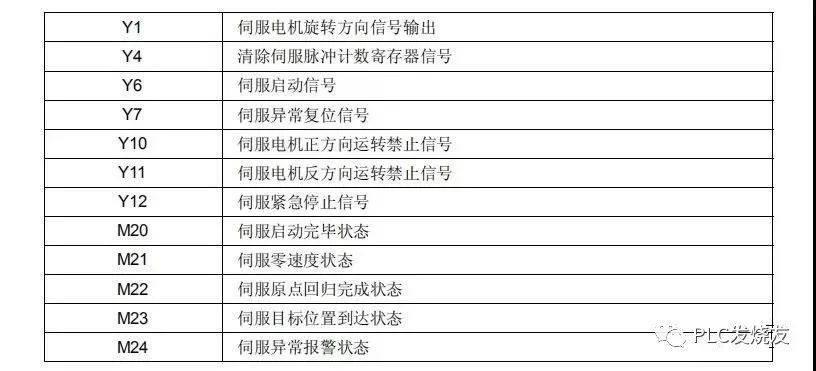
元件说明

ASD-A 伺服驱动器参数必要设置

当出现伺服因参数设置错乱而导致不能正常运行时,可先设置 P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。
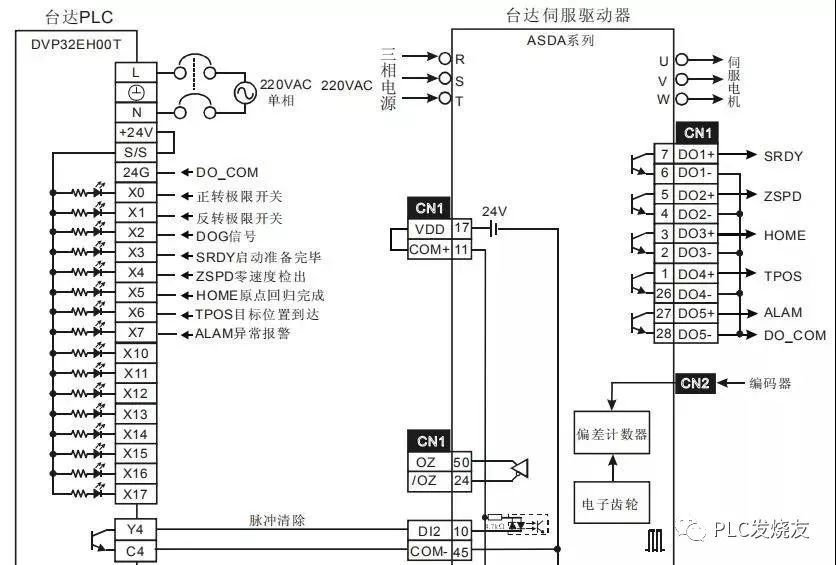
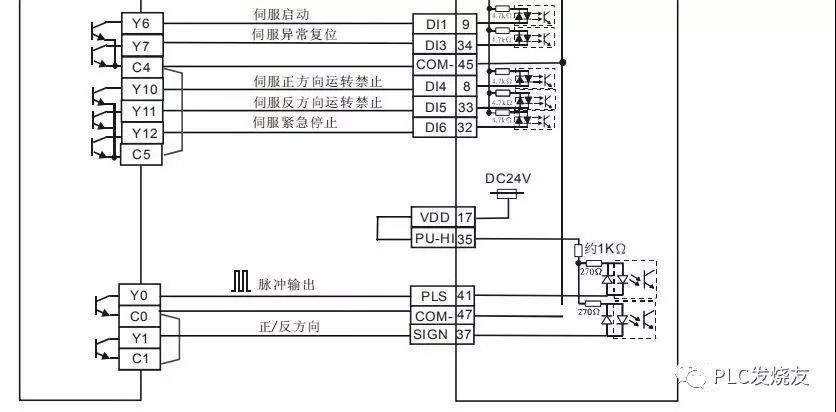
PLC 与伺服驱动器硬件接线图
控制程序

程序说明
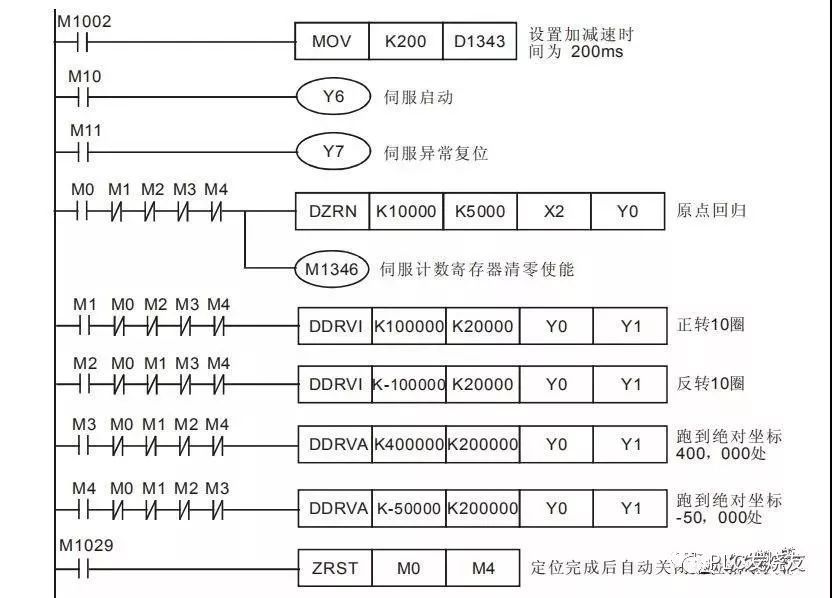
当伺服上电之后,如无警报信号,X3=On,此时,按下伺服启动开关,M10=On,伺服启动。
按下原点回归开关时,M0=On,伺服执行原点回归动作,当 DOG 信号 X2 由 Off→On 变化时,伺服以 5KHZ 的寸动速度回归原点,当 DOG 信号由 On→Off 变化时,伺服电机立即停止运转,回归原点完成。
按下正转 10 圈开关,M1=On,伺服电机执行相对定位动作,伺服电机正方向旋转 10 圈后停止运转。
按下正转 10 圈开关,M2=On,伺服电机执行相对定位动作,伺服电机反方向旋转 10 圈后停止运转。
按下坐标 400000 开关,M3=On,伺服电机执行***定位动作,到达***目标位置 400,000处后停止。
按下坐标-50000 开关,M4=On,伺服电机执行***定位动作,到达***目标位置-50,000处后停止。
若工作物碰触到正向极限传感器时,X0=On,Y10=On,伺服电机禁止正转,且伺服异常报警(M24=On)。
若工作物碰触到反向极限传感器时,X1=On,Y11=On,伺服电机禁止正转,且伺服异常报警(M24=On)。
当出现伺服异常报警后,按下伺服异常复位开关,M11=On,伺服异常报警信息解除,警报解除之后,伺服才能继续执行原点回归和定位的动作。
按下 PLC 脉冲暂停输出开关,M12=On,PLC 暂停输出脉冲,脉冲输出个数会保持在寄存器内,当 M12=Off 时,会在原来输出个数基础上,继续输出未完成的脉冲。
z按下伺服紧急停止开关时,M13=On,伺服立即停止运转,当 M13=Off 时,即使定位距离尚未完成,不同于 PLC 脉冲暂停输出,伺服将不会继续跑完未完成的距离。
程序中使用 M1346 的目的是保证伺服完成原点回归动作时,自动控制 Y4 输出一个 20ms 的伺服脉冲计数寄存器清零信号,使伺服面板显示的数值为0(对应伺服P0-02参数需设置为0)。
程序中使用 M1029 来复位 M0~M4,保证一个定位动作完成(M1029=On),该定位指令的执行条件变为 Off,保证下一次按下定位执行相关开关时定位动作能正确执行。
组件说明中作为开关及伺服状态显示的 M 装置可利用台达 DOP-A 人机界面来设计,或利用WPLSoft 来设定。
一、NEG 位移反转控制
控制要求
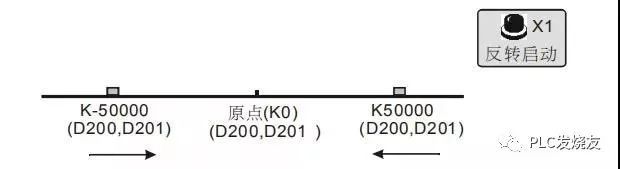
定位控制系统做左右位移运动,每按下一次按钮(X1),定位装置从当前位置反转移动到以原点(D200,D201 值为 K0)为对称中心的另一边。
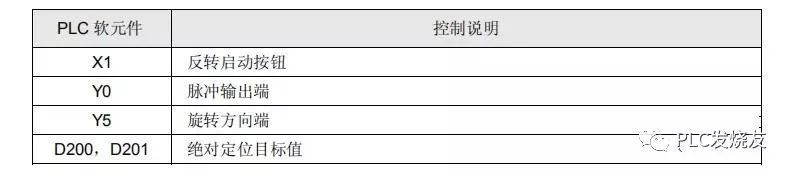
元件说明
控制程序
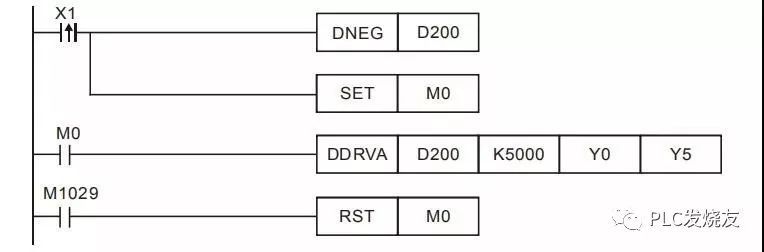
程序说明
假设 D200、D201(32 位数据)的初始内容值为 K50000,按下一次按钮后,即 X1 由 Off→On 变化,D200、D201(32 位数据)的内容值变为 K-50000。
同时,M0 被置位为 On,DDRVA 指令执行,以 5KHZ(K5000)的 频率向***目标位置 K-50000移动,目标位置到达后,M1029=On,M0 被复位为 Off,Y0 停止发送脉冲。
再次按下按钮,即 X1 由 Off→On 变化,D200、D201(32 位数据)的内容值由 K-50000 变为 K50000,同时 M0 被置位为 On,开始执行到***目标位置 K50000 的定位运动,直到到达目标位置才停止。
如此,按下一次按钮(X1),定位装置就会从当前位置移动到以原点为对称中心点的另一边。
二、两路脉冲输出
XC3 系列和 XC5 系列 PLC 一般具有 2 个脉冲输出。为了使用脉冲输出,必须要使用带有晶体管输出的 PLC。通过使用不同的指令编程方式,可以进行无加速/减速的单向脉冲输出,也可以进行带加速/减速的单向脉冲输出,还可以进行多段、正反向输出等等,输出频率***高可达 400K Hz。
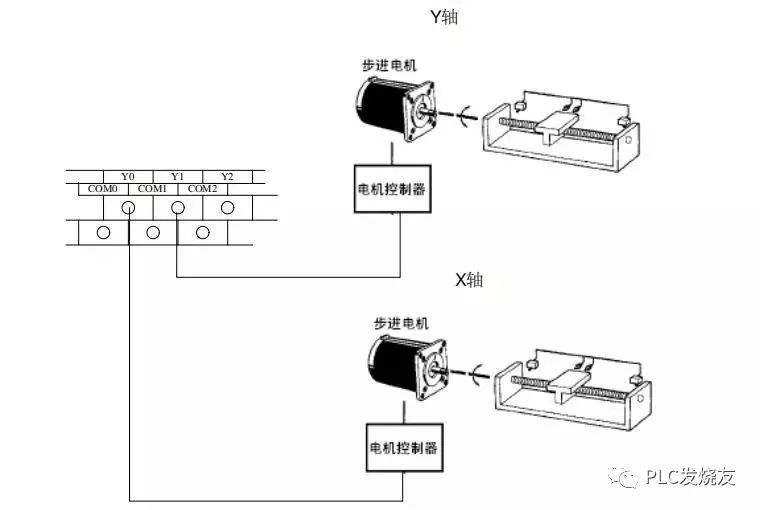
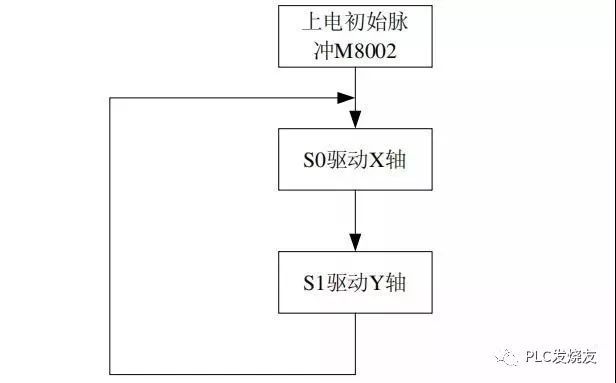
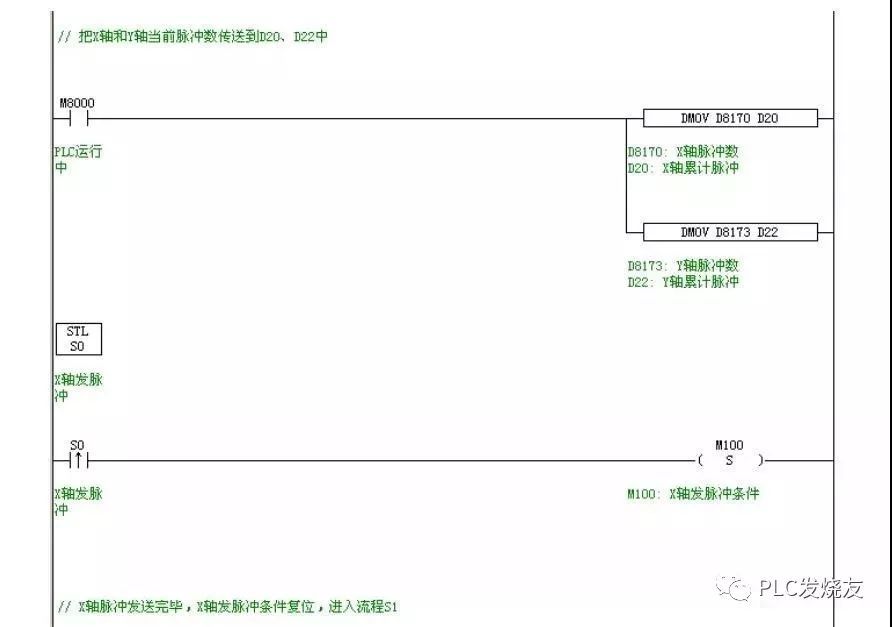
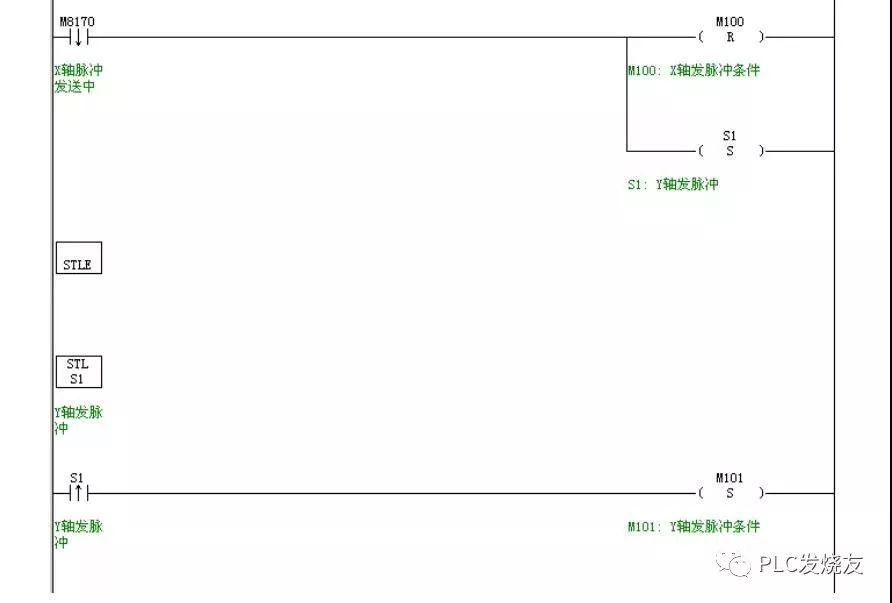
本例中,使用单段单向脉冲输出,Y0 控制 X 轴步进电机,Y1 控制 Y 轴步进电机。通过流程控制两个轴轮流驱动。
例图:
程序流程框图:
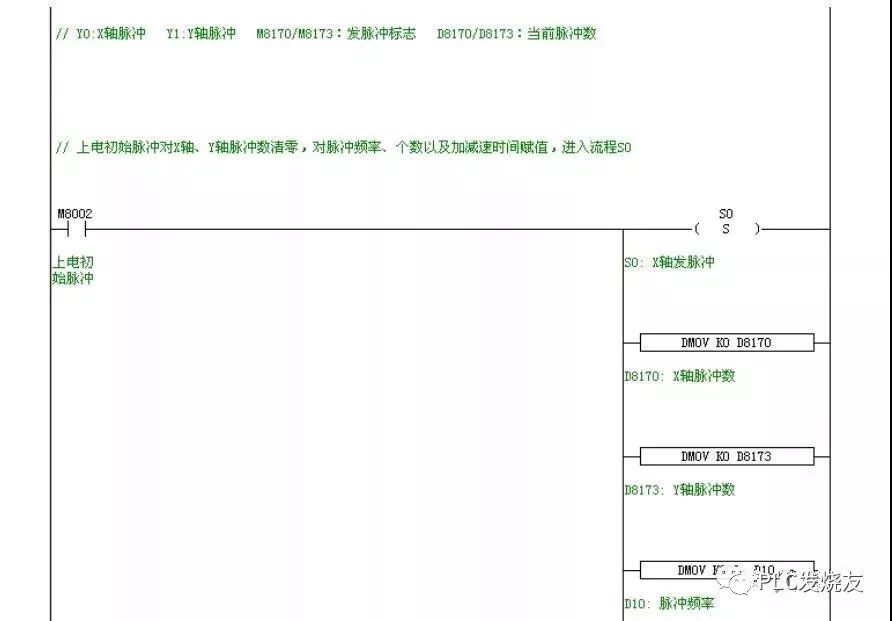
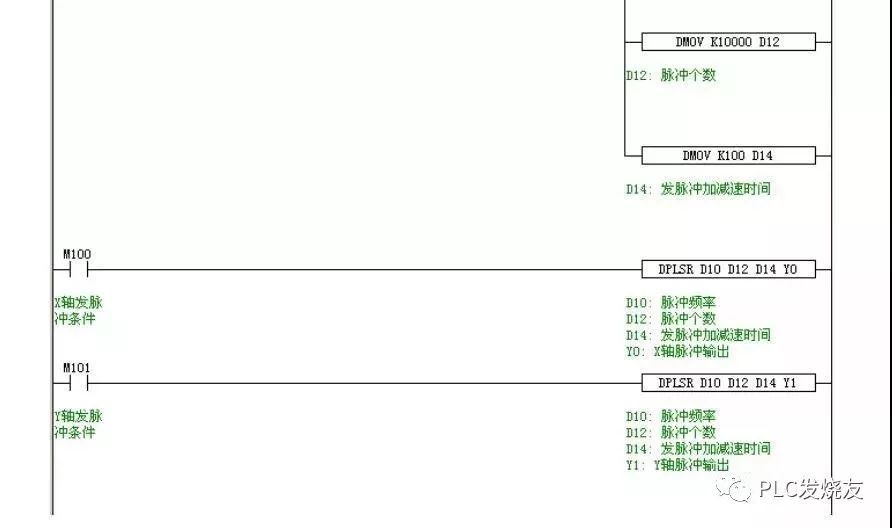
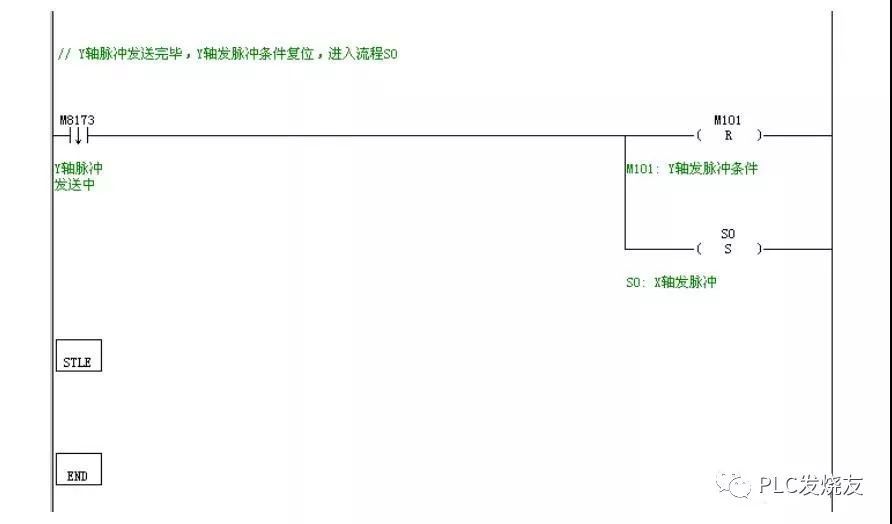
程序及注释:
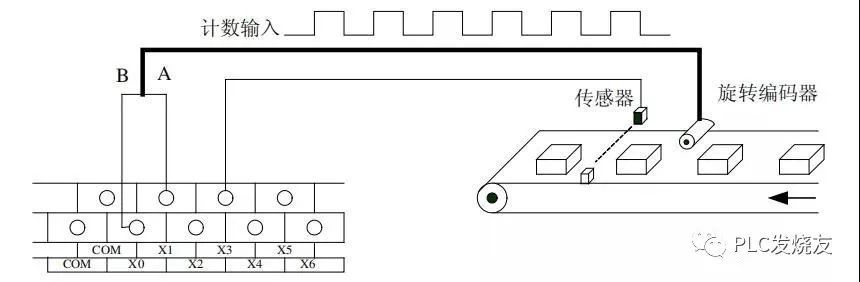
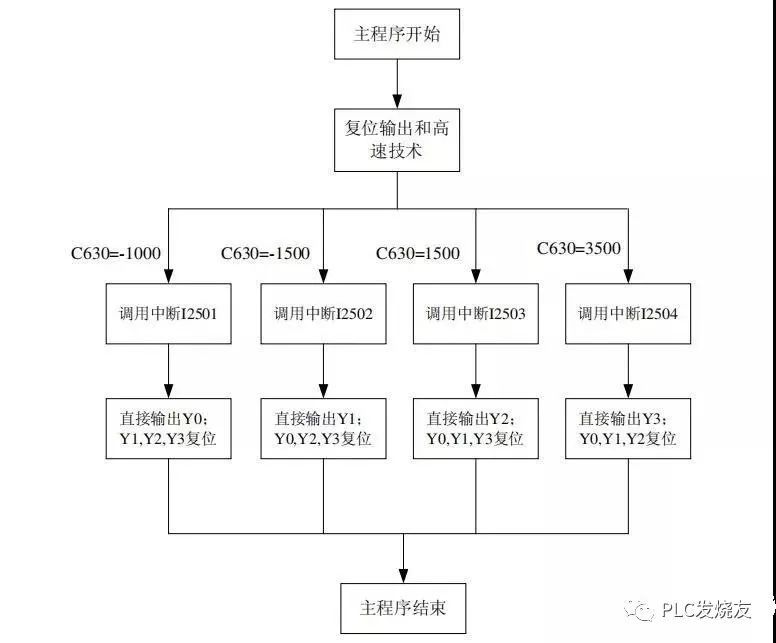
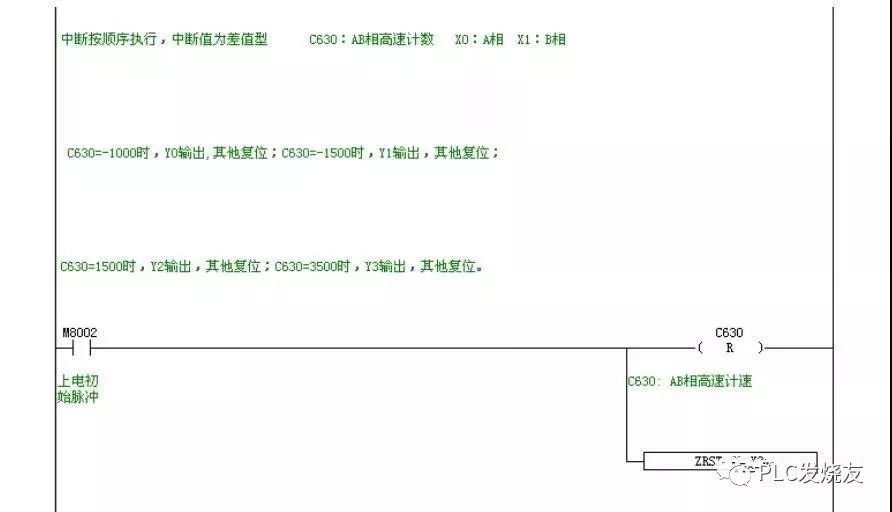
三、高速计数中断
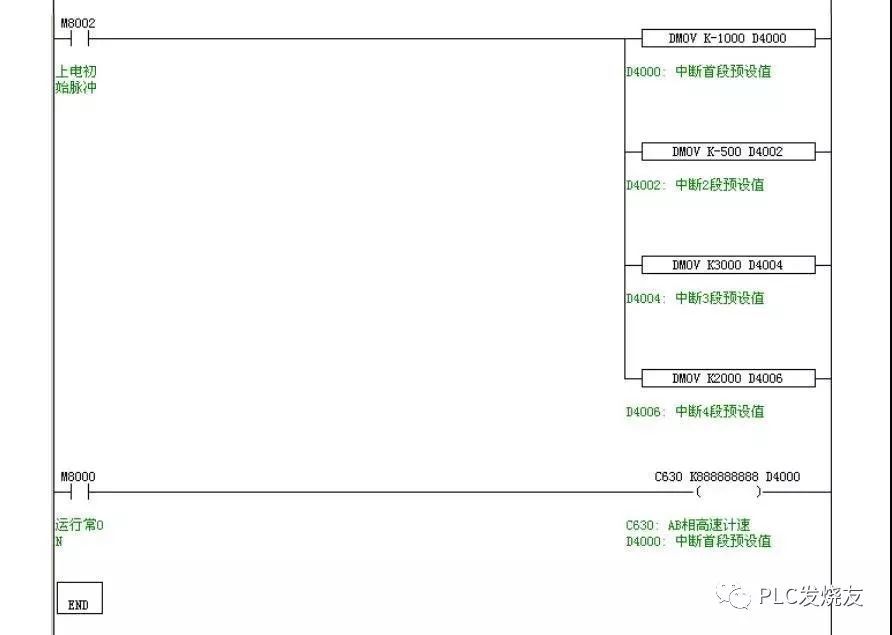
XC 系列 PLC 都具有高速计数功能,通过选择不同的计数器可以进行单相(递增模式、脉冲+方向输入模式),AB 相模式计数,***高频率可达到 200KHz。PLC 2.51 版本以上包含高速计数中断功能,每路高速计数器拥有 24 段 32 位的预置值,计数器的每段计数差值等于预置值时产生中断。
本例中,C630=-1000 时,Y0 输出,其他复位;C630=-1500 时,Y1 输出,其他复位;C630=1500 时,Y2 输出,其他复位;C630=3500 时,Y3 输出,其他复位。
例图:
程序流程框图:
程序及注释:
plc台达外部接线图 - ?--->> 1、先是输入回路接法:用导线将输入端L、N及地线接线柱分别与交流电源插座的三个插孔相连(如图);2、从输入公共端S/S引出导线和输出端标有24V接线柱相连;3、将按钮开关一端 连在PLC输入端X1接线柱,另一端连在输出端标有24G接线柱上;4、然后进行输出回路接线.将输出接线端Y1与灯泡的一端相连,灯泡另一端连在变压器负极(—V);5、用导线把变压器正极(+V)同PLC输出端C1接线柱相连;再将变压器的L、N和地线柱分别和交流电源火线、零线及地线相连.6、***后连接好的回路总体接线图.
台达plc怎么接线 - ?--->> 你的plc为晶体管类型的 ,UP接24V+ ZP 接24V- s/s为公共端 所以你的气缸电磁阀必须是24V的 ,电磁阀2根线 ,一根接24V+ ,一根接输出点Y 输入点是推挽型的 所以 接NPN 跟pnp 都可以 ,但是只能同时接一种 你的S/S要是接24V+ ,你的磁性开关一端接24V-,另一端接X点 反之S/S接24V- ,磁性开关一端接24V+,另一端接x点
台达PLC 24ES00R2输出接线方法 - ?--->> 可以将所有的C连接到一块,看做开关的一端,而Y0 Y1 Y2...则是对应的开关的另一端
台达plc可控编程器工作原理和接线图 - ?--->> 台达plc可控编程器工作原理和接线图:1. 扫描技术:当PLC控制器投入运行后,其工作过程一般分为三个阶段,即输入采样、用户程序执行和输出刷新三个阶段.完成上述三个阶段称作一个扫描周期.在整个运行期间,PLC控制器的CPU以一...
台达plc 32eh 输出外部电路怎么接,求电路图??--->> 所有的C*连接起来接24V-,所有外部负载线圈一端连接起来接24V+,另一端接相应的Y*输出口.
台达PLC dvp - 14es 外部电路怎么接线 - ?--->> 首先你要搞清楚它的电源类型,是AC电源还是DC电源,其次,就是它的输入与输复出形式.台达PLC输入有两种输入形式,制Sink和Source,也就是漏型和源型输入,+24V为传感器电源输出正端,24G为传感器电源输出负端,S/S为输入公共端,当+24V与S/S相连时,输入类型为漏型,当24G与输入端短接时输入百导通.当24G与S/S相连时,输入类型为源型,+24V与输入端短接时输入导通.输出形式也有两种,继电器输度出与晶体管输出,当为继电器输出时,输出端交直流都可接入,当为晶体管输出时,只能接入DC电源,C0,C1等等为公共端.
我在学台达PLC的编程,能否指点以下入门方法?外部接线图能给我说明一下吗?谢谢!?--->> 由输入/输出点和输入/输出的COM端分别构成两个独立的回路即可
台达PLC16ES2与24V电源.触摸屏以及NPN近接开关输入信号的接线图. - ?--->> 台达PLC输入有两种输入形式,Sink和Source,也就是漏型和源型输入,+24V为传感器电源输出正端,24G为传感器电源输出负端,S/S为输入公共端: 当+24V与S/S相连时,输入类型为漏型,当24G与输入端短接时输入导通.(NPN型输入) 当24G与S/S相连时,输入类型为源型,+24V与输入端短接时输入导通.(PNP型输入)
台达plc通过固态继电器控制电磁阀的接线图? - ?--->> PLC与继电器接线: 1、Y0接KA1的线圈一端A1; 2、KA1的另一端A2接24V; 3、Y1接接KA2的线圈一端A1; 4、KA2的另一端A2接24V; 5、COM端接24V. 继电器(Relay),也称电驿,是一种电子控制器件,它具有控制系统(又称输入回路...
如有侵权,联系即删
如想了解更多:台达plc编程官网|软件|手册|教程 (gongboshi.com)
- 下一篇:plc远程控制系统
- 上一篇:台达PLC-整合是关键
